Event Based, Near Eye Gaze Tracking Beyond 10,000 Hz
Abstract
The cameras in modern gaze-tracking systems suffer from fundamental bandwidth and power limitations, constraining data acquisition speed to 300 Hz realistically. This obstructs the use of mobile eye trackers to perform, e.g., low latency predictive rendering, or to study quick and subtle eye motions like microsaccades using head-mounted devices in the wild. Here, we propose a hybrid frame-event-based near-eye gaze tracking system offering update rates beyond 10,000 Hz with an accuracy that matches that of high-end desktop-mounted commercial trackers when evaluated in the same conditions. Our system builds on emerging event cameras that simultaneously acquire regularly sampled frames and adaptively sampled events. We develop an online 2D pupil fitting method that updates a parametric model every one or few events. Moreover, we propose a polynomial regressor for estimating the point of gaze from the parametric pupil model in real time. Using the first event-based gaze dataset we demonstrate that our system achieves accuracies of 0.45 degrees-1.75 degrees for fields of view from 45 degrees to 98 degrees. With this technology, we hope to enable a new generation of ultra-low-latency gaze-contingent rendering and display techniques for virtual and augmented reality.
Videos
Project Overview (3:30 min)
IEEE-VR talk (7 min)
Motivation
This video shows that eye tracking video data (left) is inherently sparse. We demonstrate this by showing the temporal gradients of the video (right). As evident from right-hand side, only the pixels corresponding to the major eye features like the pupil and eyelashes change significantly over time. This sparsity is directly exploited by the event sensors we use for eye tracking at ultra low latency.
System overview
This real-time video of a subject using our system shows them following a mouse cursor on-screen in real-time; the red dots on screen plot a downsampled version of our estimate of the user’s gaze point.
Input and output of our system
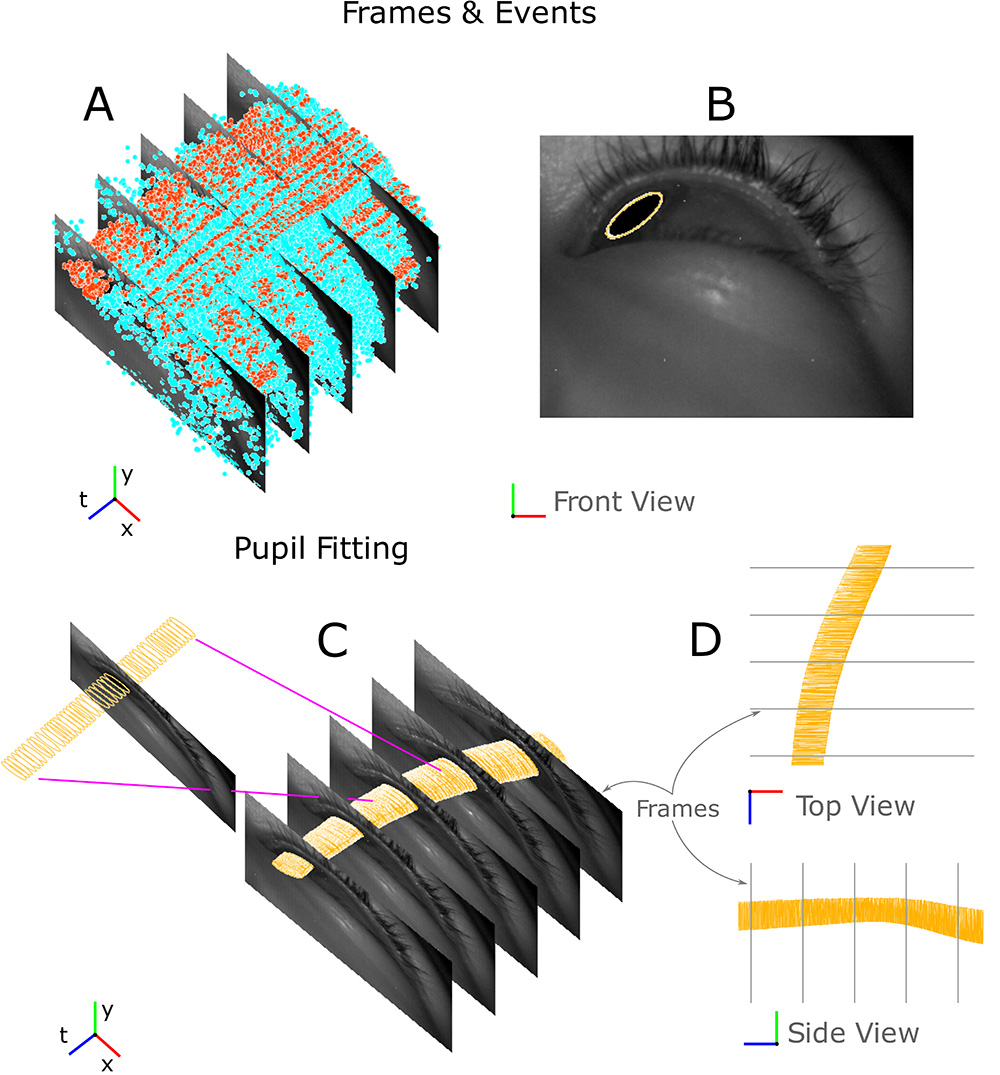
The inputs, shown in plot A, are frames recorded at a fixed sampling rate and events,
asynchronously sampling the eye motion at high speed. Frames and events are captured by the same sensor, and event
polarity is color coded in blue (+) or red (-). We output a gaze point, computed from our estimate of the pupil, shown
in yellow as seen from several perspectives in plots B, C, and D (x and y are the columns and rows of the sensor, and t
is time). Events continuously trigger between frames, allowing pupil estimation much faster than the frame rate. Every
pupil estimate yields a yellow circle. These estimates are so frequent that they form an almost continuous tubular
structure outlining the pupil’s movement through time in plots C and D.
Using events and frames…
The output of the hybrid event- and frame-based camera we use in our eye tracking system includes events sampled at an adaptive rate determined by the motion of the eye and also frames sampled at a fixed rate. This video shows the movement of the eye during a saccade, scanning backwards in time. Notice that the saccade begins in-between two frames, but the events still capture its initiation.
… to fit an eye model
Our algorithm uses frames and events together to update a parametric representation of the eye in an online manner, never storing frames or events. We use a polynomial regression to map the fitted eye model to the gaze point.
An ellipse that tracks the user’s pupil can be fit using the event-based data at 10 kHz or more when the eye moves fast. We plot a 1 px wide ellipse every time we fit a new pupil location, and the yellow, seemingly-continuous tube therefore represents the very fast sampling of the pupil’s motion produced by our system.
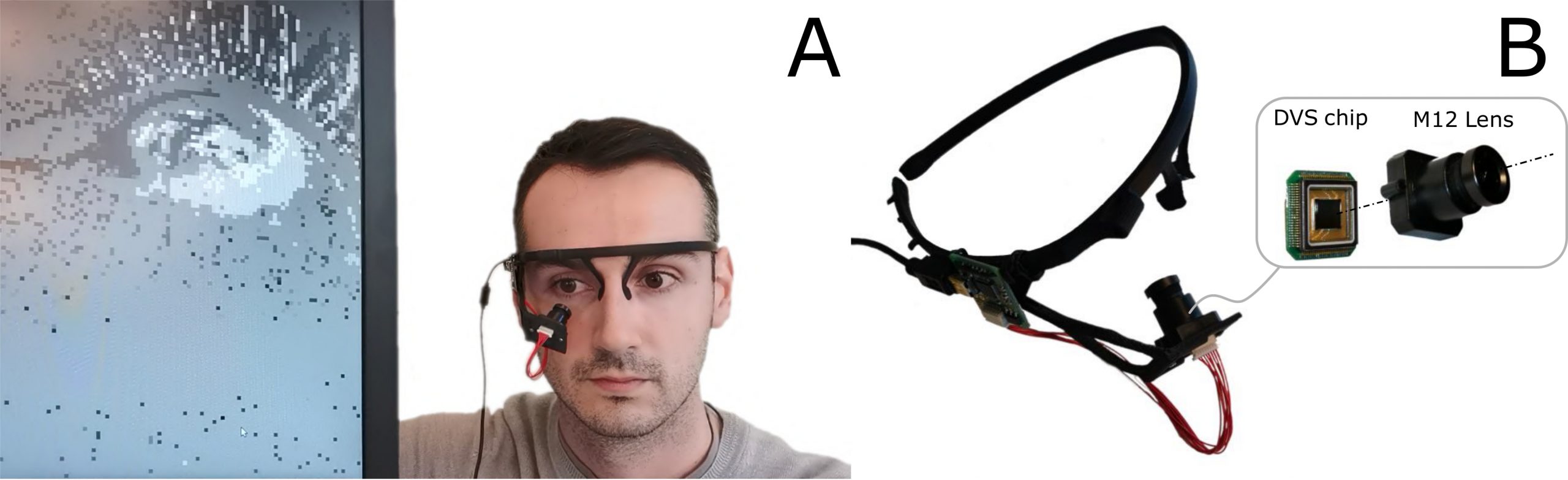
Miniature prototype
Our miniature prototype streams events in real time (A) and mounts on a pair of glasses (B), shown here with a M12 lens.
Data is streamed out of the prototype using less than 12 Mbits/s of bandwidth.
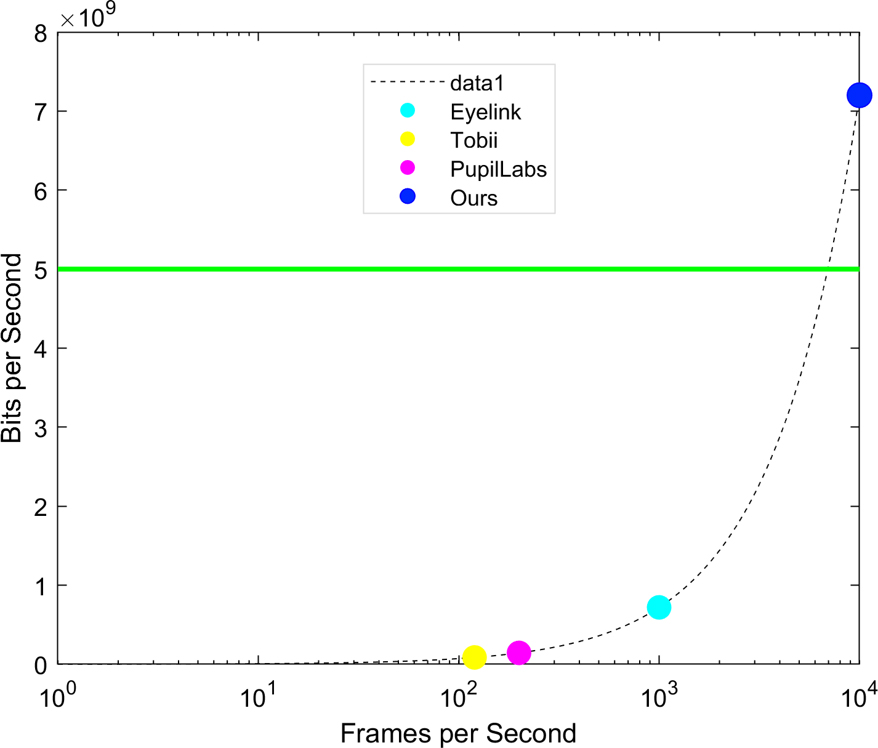
Bandwidth required
The bandwidth required by a traditional camera sampling at 10 kHz would generate more data than USB-3 can carry;
our event-based camera generates much less data by exploiting the sparsity of the signal in the sensor electronics.
The same principle also help save power.
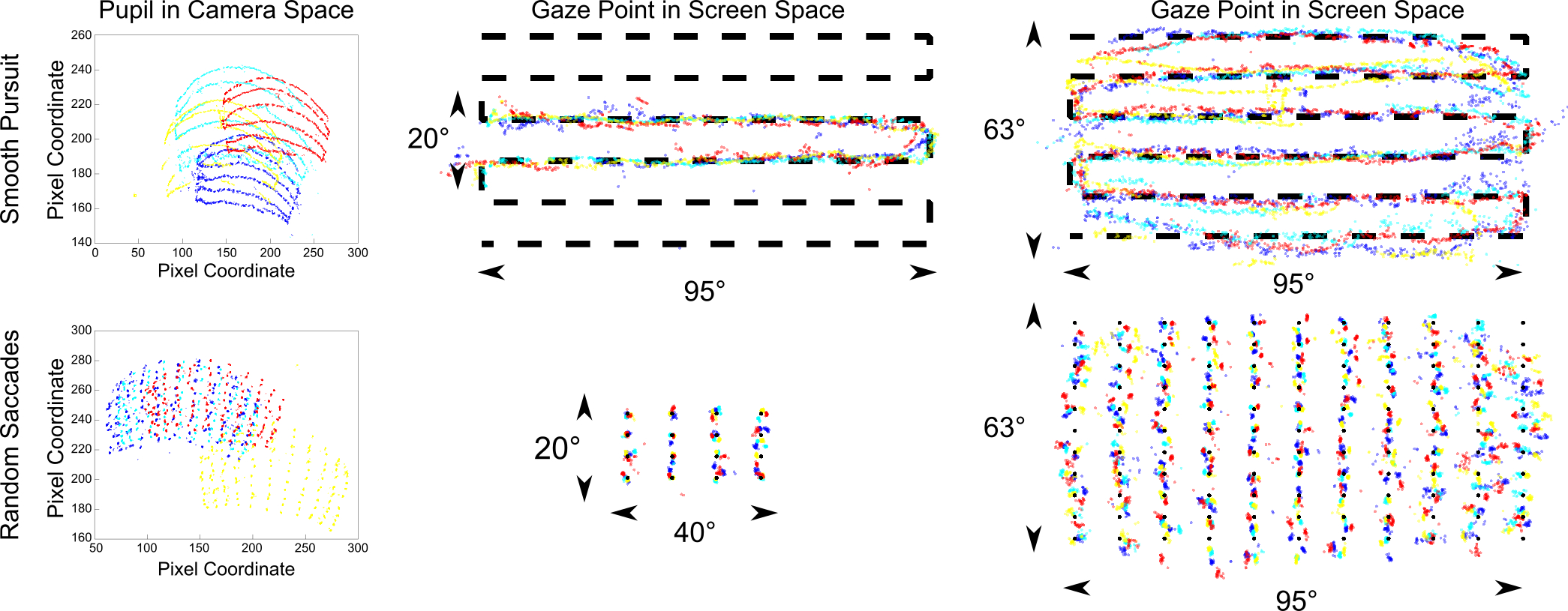
Dataset and results
Our dataset of saccadic movements, smooth purusit, and fixations was collected by asking the user to look at
pre-determined locations (the snaking black line in the top row and the black dots in the bottom row). These plots
show the output of our event-based eye tracking method for four different subjects (shown as different colors). The
movement of the subjects’ eyes tracks the stimulus location.
On Twitter
We built an eye tracker using an event-based camera that operates at 10KHz and above in a low-power and small form-factor. It has accuracy of 0.5deg in central FOV. See the oral tomorrow at #IEEEVR21, journal paper in TVCG, and website: https://t.co/KlB5SRNZrh #vr #ar #ai 🧵1/n pic.twitter.com/CzVmvfQH6k
— Anastasios Nikolas Angelopoulos (@ml_angelopoulos) March 31, 2021